Merge branch 'master' of github.com:markqvist/MicroAPRS
This commit is contained in:
commit
86f7f0fc00
Binary file not shown.
Binary file not shown.
|
|
@ -0,0 +1,137 @@
|
|||
/*
|
||||
Copyright 2014 Institute IRNAS Race - S56MC - Musti, musti@irnas.eu
|
||||
|
||||
MicroAprsNavspark is to be used with NavSpark Arduino environment, for more information visit http://navspark.com.tw
|
||||
|
||||
The MicroAprsNavspark is free software: you can redistribute it and/or modify
|
||||
it under the terms of the GNU General Public License as published by the
|
||||
Free Software Foundation, either version 3 of the License, or (at your
|
||||
option) any later version.
|
||||
|
||||
The MicroAprsNavspark is distributed in the hope that it will be useful, but
|
||||
WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY
|
||||
or FITNESS FOR A PARTICULAR PURPOSE.
|
||||
See the GNU General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU General Public License along
|
||||
with the MicroAprsNavspark. If not, see http://www.gnu.org/licenses/.
|
||||
*/
|
||||
#include "sti_gnss_lib.h"
|
||||
#include "GNSS.h"
|
||||
|
||||
#define POSITIONRATE 60 // periodically send the location - in seconds
|
||||
uint16_t delayer = 0;
|
||||
uint8_t gpio_bit = 0;
|
||||
|
||||
// Generally, you shuould use "unsigned long" for variables that hold time
|
||||
// The value will quickly become too large for an int to store
|
||||
unsigned long previousMillis = 0; // will store last time LED was updated
|
||||
float lla_deg=0;
|
||||
float lla_min=0;
|
||||
float llo_deg=0;
|
||||
float llo_min=0;
|
||||
float lla=0;
|
||||
float llo=0;
|
||||
|
||||
void setup() {
|
||||
// put your setup code here, to run once:
|
||||
GnssConf.setNavMode(STGNSS_NAV_MODE_AUTO);
|
||||
GnssConf.setUpdateRate(STGNSS_POSITION_UPDATE_RATE_1HZ);
|
||||
GnssConf.setDopMaskMode(STGNSS_DOP_MASK_AUTO);
|
||||
GnssConf.setPdopMask(30.0);
|
||||
GnssConf.setHdopMask(30.0);
|
||||
GnssConf.setGdopMask(30.0);
|
||||
GnssConf.init(); /* do initialization for GNSS */
|
||||
gnss_gpio_set_output(gpio_bit);
|
||||
|
||||
//set up the serail port to talk to MicroAPRS
|
||||
Serial.config(STGNSS_UART_8BITS_WORD_LENGTH, STGNSS_UART_1STOP_BITS, STGNSS_UART_NOPARITY);
|
||||
Serial.begin(9600);
|
||||
//configure the reset pin and reset MicroAPRS
|
||||
pinMode(14,OUTPUT);
|
||||
digitalWrite(14,LOW);
|
||||
delay(100);
|
||||
digitalWrite(14,HIGH);
|
||||
delay(100);
|
||||
// send settings
|
||||
configureMicroAPRS();
|
||||
}
|
||||
|
||||
void loop() {
|
||||
// put your main code here, to run repeatedly:
|
||||
|
||||
}
|
||||
|
||||
void configureMicroAPRS(){
|
||||
Serial.println("c<CALL>"); //callsign
|
||||
Serial.println("sc7"); //SSID
|
||||
Serial.println("S"); //save
|
||||
}
|
||||
|
||||
/*
|
||||
NOTE: "task_called_after_GNSS_update()" will be called about every second
|
||||
(for 1Hz update rate), so we display the info. here.
|
||||
*/
|
||||
void task_called_after_GNSS_update(void)
|
||||
{
|
||||
static uint8_t val = 0;
|
||||
char buf[64];
|
||||
|
||||
//blinking the blue LED
|
||||
if (val == 1) gnss_gpio_high(gpio_bit);
|
||||
else gnss_gpio_low(gpio_bit);
|
||||
val = 1 - val;
|
||||
|
||||
//triggering the position update on the defined interval
|
||||
delayer++;
|
||||
if(delayer>POSITIONRATE){
|
||||
aprs_send();
|
||||
delayer=0;
|
||||
}
|
||||
//send the counter state to PC serial port
|
||||
int len = sprintf(buf, "Counter: %d\r\n",delayer);
|
||||
gnss_uart_putline(0,(U08*)buf,len);
|
||||
}
|
||||
|
||||
void aprs_send(){
|
||||
char buf[64];
|
||||
char lla_sign;
|
||||
char llo_sign;
|
||||
// first get the updated location
|
||||
GnssInfo.update();
|
||||
|
||||
//check if the location has been updated - valid fix
|
||||
if (GnssInfo.isUpdated() == true) {
|
||||
//get location information
|
||||
lla=GnssInfo.location.latitude();
|
||||
llo=GnssInfo.location.longitude();
|
||||
|
||||
//determine hemisphere
|
||||
if(lla>=0){
|
||||
lla_sign=0x4e; //capital N
|
||||
}
|
||||
else{
|
||||
lla_sign=0x53; //capital S
|
||||
lla*=-1;//make the number positive
|
||||
}
|
||||
if(llo>=0){
|
||||
llo_sign=0x45; //capital E
|
||||
}
|
||||
else{
|
||||
llo_sign=0x57; //capital W
|
||||
llo*=-1;//make the number positive
|
||||
}
|
||||
|
||||
//convert it to deg, min format
|
||||
lla_deg=(int)lla;
|
||||
lla_min=(lla-lla_deg)*60;
|
||||
llo_deg=(int)llo;
|
||||
llo_min=(llo-llo_deg)*60;
|
||||
|
||||
//print to serial port
|
||||
uint8_t len=sprintf(buf, "!=%02.0f%.2f%c/%03.0f%.2f%c-PHG2/3060/MicroAPRS+Navspark\r\n",lla_deg,lla_min,lla_sign,llo_deg,llo_min,llo_sign);
|
||||
Serial.print(buf);
|
||||
gnss_uart_putline(0,(U08*)buf,len);
|
||||
}
|
||||
}
|
||||
|
||||
|
|
@ -0,0 +1,38 @@
|
|||
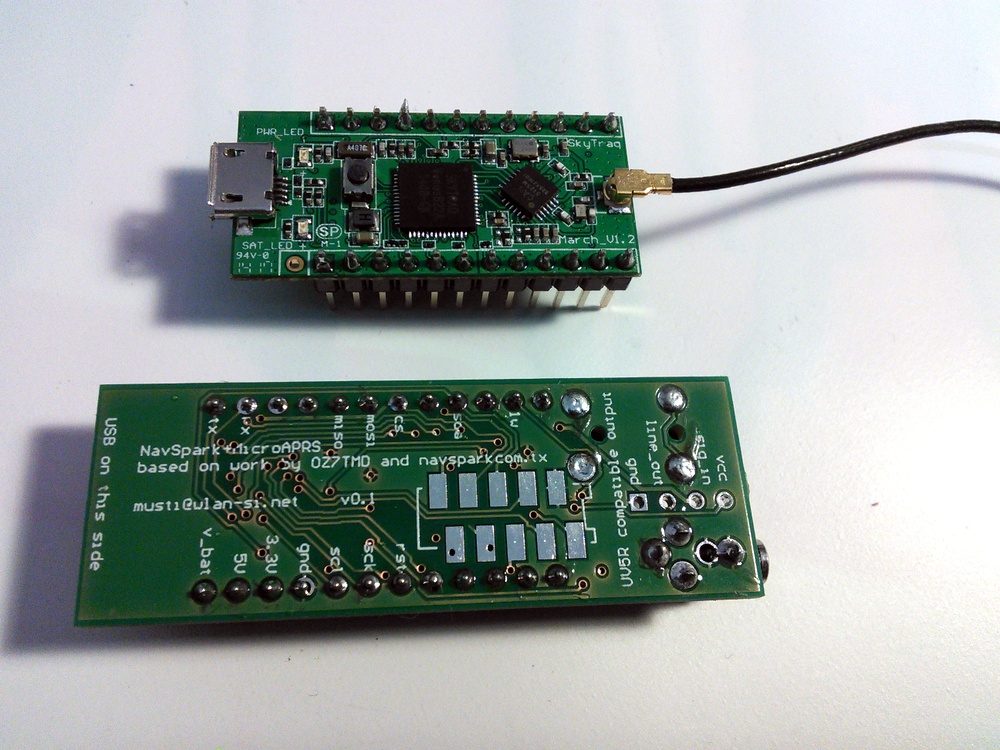
Standalone MicroAPRS + Navspark GPS
|
||||
==========
|
||||
|
||||
Standalone MicroAPRS + Navspark GPS module is the is fork of [MicroAPRS](https://github.com/markqvist/MicroAPRS). It is a standalone arduino compatible board with modem circuitry acting as a daughter board for [NavSpark](http://navspark.com.tw/) GPS/Glonass/Beidu Arduino compatible modules.
|
||||
|
||||
Please read the Mcicro APRS documentation prior to continuing here.
|
||||
|
||||
## Features
|
||||
|
||||
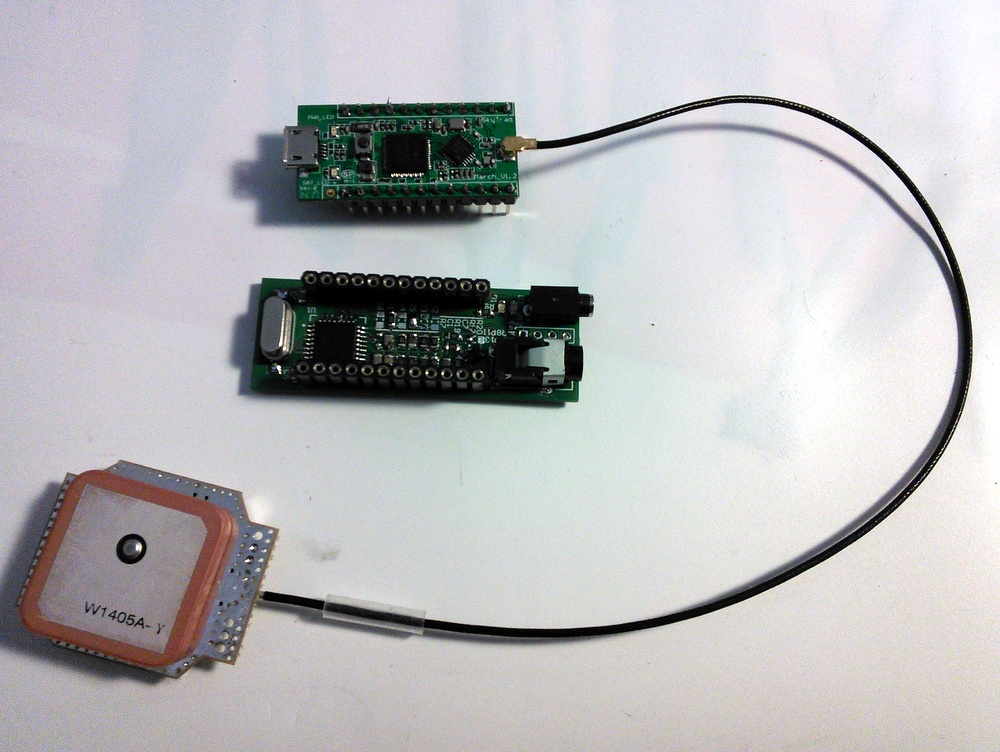
- Arduino Pro Mini 5V 16MHz compatible hardware design
|
||||
- MicroAPRS modem design, with some component values tweaked
|
||||
- Compatible with Wouxun/Baofeng low-cost radios that have a 3.5mm+2.5mm jack connection. UV-5R is a good choice.
|
||||
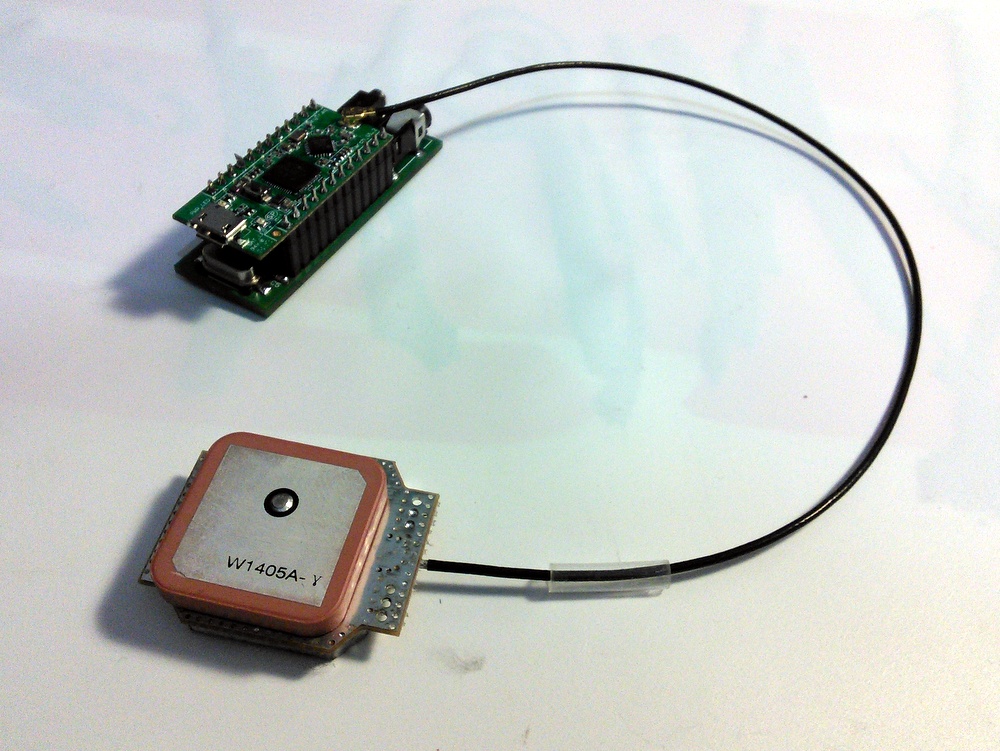
- Powered either from USB via Navspark or from battery via Navspark on-board regulator
|
||||
- Support for use of DS18B20 temperature sensors
|
||||
- ADC channel with a divider for reading the battery voltage level
|
||||
|
||||
|
||||
|
||||
## Instructions
|
||||
|
||||
Get the PCB manufactured with your preferred source, gerber files are published here. Solder the circuit and upload MicroAPRS code. Program Navspark with the code published here, modify it to contain you callsign and SSID. Enjoy.
|
||||
|
||||
By default location updates will be sent out ever 60s when then location fix is obtained.
|
||||
|
||||
### ToDo
|
||||
|
||||
Currently this this tracking system is very simple and sends a location update at a fixed interval. With NavSpark library it is possible to get the distance and many other parameters, creating a smarter location update mechanism.
|
||||
|
||||
The code can be cleaned up and optimized.
|
||||
|
||||
Create a 3D printed enclosure that clips to a radio and powers the circuit from its charging contacts.
|
||||
|
||||
Optimize the Navspark Arduino applicaton for power consumption.
|
||||
|
||||
|
||||

|
||||
|
||||
|
||||
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 284 KiB |
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 211 KiB |
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 278 KiB |
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 290 KiB |
Loading…
Reference in New Issue