Controlnet training (#2545)
* Controlnet training code initial commit Works with circle dataset: https://github.com/lllyasviel/ControlNet/blob/main/docs/train.md * Script for adding a controlnet to existing model * Fix control image transform Control image should be in 0..1 range. * Add license header and remove more unused configs * controlnet training readme * Allow nonlocal model in add_controlnet.py * Formatting * Remove unused code * Code quality * Initialize controlnet in training script * Formatting * Address review comments * doc style * explicit constructor args and submodule names * hub dataset NOTE - not tested * empty prompts * add conditioning image * rename * remove instance data dir * image_transforms -> -1,1 . conditioning_image_transformers -> 0, 1 * nits * remove local rank config I think this isn't necessary in any of our training scripts * validation images * proportion_empty_prompts typo * weight copying to controlnet bug * call log validation fix * fix * gitignore wandb * fix progress bar and resume from checkpoint iteration * initial step fix * log multiple images * fix * fixes * tracker project name configurable * misc * add controlnet requirements.txt * update docs * image labels * small fixes * log validation using existing models for pipeline * fix for deepspeed saving * memory usage docs * Update examples/controlnet/train_controlnet.py Co-authored-by: Sayak Paul <spsayakpaul@gmail.com> * Update examples/controlnet/train_controlnet.py Co-authored-by: Sayak Paul <spsayakpaul@gmail.com> * Update examples/controlnet/README.md Co-authored-by: Sayak Paul <spsayakpaul@gmail.com> * Update examples/controlnet/README.md Co-authored-by: Sayak Paul <spsayakpaul@gmail.com> * Update examples/controlnet/README.md Co-authored-by: Sayak Paul <spsayakpaul@gmail.com> * Update examples/controlnet/README.md Co-authored-by: Sayak Paul <spsayakpaul@gmail.com> * Update examples/controlnet/README.md Co-authored-by: Sayak Paul <spsayakpaul@gmail.com> * Update examples/controlnet/README.md Co-authored-by: Sayak Paul <spsayakpaul@gmail.com> * Update examples/controlnet/README.md Co-authored-by: Sayak Paul <spsayakpaul@gmail.com> * Update examples/controlnet/README.md Co-authored-by: Sayak Paul <spsayakpaul@gmail.com> * remove extra is main process check * link to dataset in intro paragraph * remove unnecessary paragraph * note on deepspeed * Update examples/controlnet/README.md Co-authored-by: Patrick von Platen <patrick.v.platen@gmail.com> * assert -> value error * weights and biases note * move images out of git * remove .gitignore --------- Co-authored-by: William Berman <WLBberman@gmail.com> Co-authored-by: Sayak Paul <spsayakpaul@gmail.com> Co-authored-by: Patrick von Platen <patrick.v.platen@gmail.com>
This commit is contained in:
parent
279f744ce5
commit
79eb3d07d0
|
|
@ -172,3 +172,5 @@ tags
|
|||
|
||||
# ruff
|
||||
.ruff_cache
|
||||
|
||||
wandb
|
||||
|
|
@ -0,0 +1,269 @@
|
|||
# ControlNet training example
|
||||
|
||||
[Adding Conditional Control to Text-to-Image Diffusion Models](https://arxiv.org/abs/2302.05543) by Lvmin Zhang and Maneesh Agrawala.
|
||||
|
||||
This example is based on the [training example in the original ControlNet repository](https://github.com/lllyasviel/ControlNet/blob/main/docs/train.md). It trains a ControlNet to fill circles using a [small synthetic dataset](https://huggingface.co/datasets/fusing/fill50k).
|
||||
|
||||
## Installing the dependencies
|
||||
|
||||
Before running the scripts, make sure to install the library's training dependencies:
|
||||
|
||||
**Important**
|
||||
|
||||
To make sure you can successfully run the latest versions of the example scripts, we highly recommend **installing from source** and keeping the install up to date as we update the example scripts frequently and install some example-specific requirements. To do this, execute the following steps in a new virtual environment:
|
||||
```bash
|
||||
git clone https://github.com/huggingface/diffusers
|
||||
cd diffusers
|
||||
pip install -e .
|
||||
```
|
||||
|
||||
Then cd in the example folder and run
|
||||
```bash
|
||||
pip install -r requirements.txt
|
||||
```
|
||||
|
||||
And initialize an [🤗Accelerate](https://github.com/huggingface/accelerate/) environment with:
|
||||
|
||||
```bash
|
||||
accelerate config
|
||||
```
|
||||
|
||||
Or for a default accelerate configuration without answering questions about your environment
|
||||
|
||||
```bash
|
||||
accelerate config default
|
||||
```
|
||||
|
||||
Or if your environment doesn't support an interactive shell e.g. a notebook
|
||||
|
||||
```python
|
||||
from accelerate.utils import write_basic_config
|
||||
write_basic_config()
|
||||
```
|
||||
|
||||
## Circle filling dataset
|
||||
|
||||
The original dataset is hosted in the [ControlNet repo](https://huggingface.co/lllyasviel/ControlNet/blob/main/training/fill50k.zip). We re-uploaded it to be compatible with `datasets` [here](https://huggingface.co/datasets/fusing/fill50k). Note that `datasets` handles dataloading within the training script.
|
||||
|
||||
Our training examples use [Stable Diffusion 1.5](https://huggingface.co/runwayml/stable-diffusion-v1-5) as the original set of ControlNet models were trained from it. However, ControlNet can be trained to augment any Stable Diffusion compatible model (such as [CompVis/stable-diffusion-v1-4](https://huggingface.co/CompVis/stable-diffusion-v1-4)) or [stabilityai/stable-diffusion-2-1](https://huggingface.co/stabilityai/stable-diffusion-2-1).
|
||||
|
||||
## Training
|
||||
|
||||
Our training examples use two test conditioning images. They can be downloaded by running
|
||||
|
||||
```sh
|
||||
wget https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/controlnet_training/conditioning_image_1.png
|
||||
|
||||
wget https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/controlnet_training/conditioning_image_2.png
|
||||
```
|
||||
|
||||
|
||||
```bash
|
||||
export MODEL_DIR="runwayml/stable-diffusion-v1-5"
|
||||
export OUTPUT_DIR="path to save model"
|
||||
|
||||
accelerate launch train_controlnet.py \
|
||||
--pretrained_model_name_or_path=$MODEL_DIR \
|
||||
--output_dir=$OUTPUT_DIR \
|
||||
--dataset_name=fusing/fill50k \
|
||||
--resolution=512 \
|
||||
--learning_rate=1e-5 \
|
||||
--validation_image "./conditioning_image_1.png" "./conditioning_image_2.png" \
|
||||
--validation_prompt "red circle with blue background" "cyan circle with brown floral background" \
|
||||
--train_batch_size=4
|
||||
```
|
||||
|
||||
This default configuration requires ~38GB VRAM.
|
||||
|
||||
By default, the training script logs outputs to tensorboard. Pass `--report_to wandb` to use weights and
|
||||
biases.
|
||||
|
||||
Gradient accumulation with a smaller batch size can be used to reduce training requirements to ~20 GB VRAM.
|
||||
|
||||
```bash
|
||||
export MODEL_DIR="runwayml/stable-diffusion-v1-5"
|
||||
export OUTPUT_DIR="path to save model"
|
||||
|
||||
accelerate launch train_controlnet.py \
|
||||
--pretrained_model_name_or_path=$MODEL_DIR \
|
||||
--output_dir=$OUTPUT_DIR \
|
||||
--dataset_name=fusing/fill50k \
|
||||
--resolution=512 \
|
||||
--learning_rate=1e-5 \
|
||||
--validation_image "./conditioning_image_1.png" "./conditioning_image_2.png" \
|
||||
--validation_prompt "red circle with blue background" "cyan circle with brown floral background" \
|
||||
--train_batch_size=1 \
|
||||
--gradient_accumulation_steps=4
|
||||
```
|
||||
|
||||
## Example results
|
||||
|
||||
#### After 300 steps with batch size 8
|
||||
|
||||
| | |
|
||||
|-------------------|:-------------------------:|
|
||||
| | red circle with blue background |
|
||||
 | 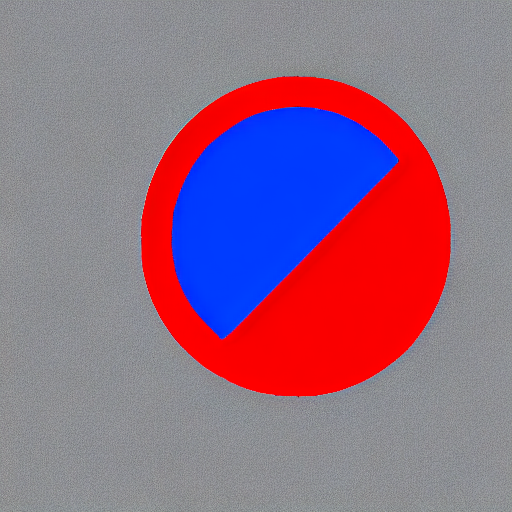 |
|
||||
| | cyan circle with brown floral background |
|
||||
 | 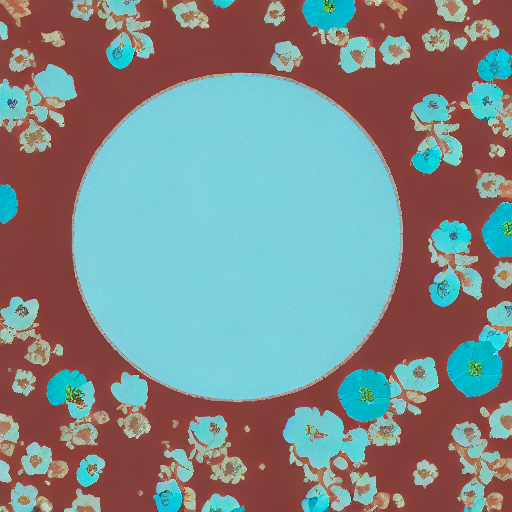 |
|
||||
|
||||
|
||||
#### After 6000 steps with batch size 8:
|
||||
|
||||
| | |
|
||||
|-------------------|:-------------------------:|
|
||||
| | red circle with blue background |
|
||||
 |  |
|
||||
| | cyan circle with brown floral background |
|
||||
 |  |
|
||||
|
||||
## Training on a 16 GB GPU
|
||||
|
||||
Optimizations:
|
||||
- Gradient checkpointing
|
||||
- bitsandbyte's 8-bit optimizer
|
||||
|
||||
[bitandbytes install instructions](https://github.com/TimDettmers/bitsandbytes#requirements--installation).
|
||||
|
||||
```bash
|
||||
export MODEL_DIR="runwayml/stable-diffusion-v1-5"
|
||||
export OUTPUT_DIR="path to save model"
|
||||
|
||||
accelerate launch train_controlnet.py \
|
||||
--pretrained_model_name_or_path=$MODEL_DIR \
|
||||
--output_dir=$OUTPUT_DIR \
|
||||
--dataset_name=fusing/fill50k \
|
||||
--resolution=512 \
|
||||
--learning_rate=1e-5 \
|
||||
--validation_image "./conditioning_image_1.png" "./conditioning_image_2.png" \
|
||||
--validation_prompt "red circle with blue background" "cyan circle with brown floral background" \
|
||||
--train_batch_size=1 \
|
||||
--gradient_accumulation_steps=4 \
|
||||
--gradient_checkpointing \
|
||||
--use_8bit_adam
|
||||
```
|
||||
|
||||
## Training on a 12 GB GPU
|
||||
|
||||
Optimizations:
|
||||
- Gradient checkpointing
|
||||
- bitsandbyte's 8-bit optimizer
|
||||
- xformers
|
||||
- set grads to none
|
||||
|
||||
```bash
|
||||
export MODEL_DIR="runwayml/stable-diffusion-v1-5"
|
||||
export OUTPUT_DIR="path to save model"
|
||||
|
||||
accelerate launch train_controlnet.py \
|
||||
--pretrained_model_name_or_path=$MODEL_DIR \
|
||||
--output_dir=$OUTPUT_DIR \
|
||||
--dataset_name=fusing/fill50k \
|
||||
--resolution=512 \
|
||||
--learning_rate=1e-5 \
|
||||
--validation_image "./conditioning_image_1.png" "./conditioning_image_2.png" \
|
||||
--validation_prompt "red circle with blue background" "cyan circle with brown floral background" \
|
||||
--train_batch_size=1 \
|
||||
--gradient_accumulation_steps=4 \
|
||||
--gradient_checkpointing \
|
||||
--use_8bit_adam \
|
||||
--enable_xformers_memory_efficient_attention \
|
||||
--set_grads_to_none
|
||||
```
|
||||
|
||||
When using `enable_xformers_memory_efficient_attention`, please make sure to install `xformers` by `pip install xformers`.
|
||||
|
||||
## Training on an 8 GB GPU
|
||||
|
||||
We have not exhaustively tested DeepSpeed support for ControlNet. While the configuration does
|
||||
save memory, we have not confirmed the configuration to train successfully. You will very likely
|
||||
have to make changes to the config to have a successful training run.
|
||||
|
||||
Optimizations:
|
||||
- Gradient checkpointing
|
||||
- xformers
|
||||
- set grads to none
|
||||
- DeepSpeed stage 2 with parameter and optimizer offloading
|
||||
- fp16 mixed precision
|
||||
|
||||
[DeepSpeed](https://www.deepspeed.ai/) can offload tensors from VRAM to either
|
||||
CPU or NVME. This requires significantly more RAM (about 25 GB).
|
||||
|
||||
Use `accelerate config` to enable DeepSpeed stage 2.
|
||||
|
||||
The relevant parts of the resulting accelerate config file are
|
||||
|
||||
```yaml
|
||||
compute_environment: LOCAL_MACHINE
|
||||
deepspeed_config:
|
||||
gradient_accumulation_steps: 4
|
||||
offload_optimizer_device: cpu
|
||||
offload_param_device: cpu
|
||||
zero3_init_flag: false
|
||||
zero_stage: 2
|
||||
distributed_type: DEEPSPEED
|
||||
```
|
||||
|
||||
See [documentation](https://huggingface.co/docs/accelerate/usage_guides/deepspeed) for more DeepSpeed configuration options.
|
||||
|
||||
Changing the default Adam optimizer to DeepSpeed's Adam
|
||||
`deepspeed.ops.adam.DeepSpeedCPUAdam` gives a substantial speedup but
|
||||
it requires CUDA toolchain with the same version as pytorch. 8-bit optimizer
|
||||
does not seem to be compatible with DeepSpeed at the moment.
|
||||
|
||||
```bash
|
||||
export MODEL_DIR="runwayml/stable-diffusion-v1-5"
|
||||
export OUTPUT_DIR="path to save model"
|
||||
|
||||
accelerate launch train_controlnet.py \
|
||||
--pretrained_model_name_or_path=$MODEL_DIR \
|
||||
--output_dir=$OUTPUT_DIR \
|
||||
--dataset_name=fusing/fill50k \
|
||||
--resolution=512 \
|
||||
--validation_image "./conditioning_image_1.png" "./conditioning_image_2.png" \
|
||||
--validation_prompt "red circle with blue background" "cyan circle with brown floral background" \
|
||||
--train_batch_size=1 \
|
||||
--gradient_accumulation_steps=4 \
|
||||
--gradient_checkpointing \
|
||||
--enable_xformers_memory_efficient_attention \
|
||||
--set_grads_to_none \
|
||||
--mixed_precision fp16
|
||||
```
|
||||
|
||||
## Performing inference with the trained ControlNet
|
||||
|
||||
The trained model can be run the same as the original ControlNet pipeline with the newly trained ControlNet.
|
||||
Set `base_model_path` and `controlnet_path` to the values `--pretrained_model_name_or_path` and
|
||||
`--output_dir` were respectively set to in the training script.
|
||||
|
||||
```py
|
||||
from diffusers import StableDiffusionControlNetPipeline, ControlNetModel, UniPCMultistepScheduler
|
||||
from diffusers.utils import load_image
|
||||
import torch
|
||||
|
||||
base_model_path = "path to model"
|
||||
controlnet_path = "path to controlnet"
|
||||
|
||||
controlnet = ControlNetModel.from_pretrained(controlnet_path, torch_dtype=torch.float16)
|
||||
pipe = StableDiffusionControlNetPipeline.from_pretrained(
|
||||
base_model_path, controlnet=controlnet, torch_dtype=torch.float16
|
||||
)
|
||||
|
||||
# speed up diffusion process with faster scheduler and memory optimization
|
||||
pipe.scheduler = UniPCMultistepScheduler.from_config(pipe.scheduler.config)
|
||||
# remove following line if xformers is not installed
|
||||
pipe.enable_xformers_memory_efficient_attention()
|
||||
|
||||
pipe.enable_model_cpu_offload()
|
||||
|
||||
control_image = load_image("./conditioning_image_1.png")
|
||||
prompt = "pale golden rod circle with old lace background"
|
||||
|
||||
# generate image
|
||||
generator = torch.manual_seed(0)
|
||||
image = pipe(
|
||||
prompt, num_inference_steps=20, generator=generator, image=control_image
|
||||
).images[0]
|
||||
|
||||
image.save("./output.png")
|
||||
```
|
||||
|
|
@ -0,0 +1,6 @@
|
|||
accelerate
|
||||
torchvision
|
||||
transformers>=4.25.1
|
||||
ftfy
|
||||
tensorboard
|
||||
datasets
|
||||
File diff suppressed because it is too large
Load Diff
|
|
@ -29,6 +29,7 @@ from .unet_2d_blocks import (
|
|||
UNetMidBlock2DCrossAttn,
|
||||
get_down_block,
|
||||
)
|
||||
from .unet_2d_condition import UNet2DConditionModel
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
|
||||
|
|
@ -257,6 +258,60 @@ class ControlNetModel(ModelMixin, ConfigMixin):
|
|||
upcast_attention=upcast_attention,
|
||||
)
|
||||
|
||||
@classmethod
|
||||
def from_unet(
|
||||
cls,
|
||||
unet: UNet2DConditionModel,
|
||||
controlnet_conditioning_channel_order: str = "rgb",
|
||||
conditioning_embedding_out_channels: Optional[Tuple[int]] = (16, 32, 96, 256),
|
||||
load_weights_from_unet: bool = True,
|
||||
):
|
||||
r"""
|
||||
Instantiate Controlnet class from UNet2DConditionModel.
|
||||
|
||||
Parameters:
|
||||
unet (`UNet2DConditionModel`):
|
||||
UNet model which weights are copied to the ControlNet. Note that all configuration options are also
|
||||
copied where applicable.
|
||||
"""
|
||||
controlnet = cls(
|
||||
in_channels=unet.config.in_channels,
|
||||
flip_sin_to_cos=unet.config.flip_sin_to_cos,
|
||||
freq_shift=unet.config.freq_shift,
|
||||
down_block_types=unet.config.down_block_types,
|
||||
only_cross_attention=unet.config.only_cross_attention,
|
||||
block_out_channels=unet.config.block_out_channels,
|
||||
layers_per_block=unet.config.layers_per_block,
|
||||
downsample_padding=unet.config.downsample_padding,
|
||||
mid_block_scale_factor=unet.config.mid_block_scale_factor,
|
||||
act_fn=unet.config.act_fn,
|
||||
norm_num_groups=unet.config.norm_num_groups,
|
||||
norm_eps=unet.config.norm_eps,
|
||||
cross_attention_dim=unet.config.cross_attention_dim,
|
||||
attention_head_dim=unet.config.attention_head_dim,
|
||||
use_linear_projection=unet.config.use_linear_projection,
|
||||
class_embed_type=unet.config.class_embed_type,
|
||||
num_class_embeds=unet.config.num_class_embeds,
|
||||
upcast_attention=unet.config.upcast_attention,
|
||||
resnet_time_scale_shift=unet.config.resnet_time_scale_shift,
|
||||
projection_class_embeddings_input_dim=unet.config.projection_class_embeddings_input_dim,
|
||||
controlnet_conditioning_channel_order=controlnet_conditioning_channel_order,
|
||||
conditioning_embedding_out_channels=conditioning_embedding_out_channels,
|
||||
)
|
||||
|
||||
if load_weights_from_unet:
|
||||
controlnet.conv_in.load_state_dict(unet.conv_in.state_dict())
|
||||
controlnet.time_proj.load_state_dict(unet.time_proj.state_dict())
|
||||
controlnet.time_embedding.load_state_dict(unet.time_embedding.state_dict())
|
||||
|
||||
if controlnet.class_embedding:
|
||||
controlnet.class_embedding.load_state_dict(unet.class_embedding.state_dict())
|
||||
|
||||
controlnet.down_blocks.load_state_dict(unet.down_blocks.state_dict())
|
||||
controlnet.mid_block.load_state_dict(unet.mid_block.state_dict())
|
||||
|
||||
return controlnet
|
||||
|
||||
@property
|
||||
# Copied from diffusers.models.unet_2d_condition.UNet2DConditionModel.attn_processors
|
||||
def attn_processors(self) -> Dict[str, AttnProcessor]:
|
||||
|
|
|
|||
|
|
@ -611,9 +611,17 @@ class StableDiffusionControlNetPipeline(DiffusionPipeline):
|
|||
image = [image]
|
||||
|
||||
if isinstance(image[0], PIL.Image.Image):
|
||||
image = [
|
||||
np.array(i.resize((width, height), resample=PIL_INTERPOLATION["lanczos"]))[None, :] for i in image
|
||||
]
|
||||
images = []
|
||||
|
||||
for image_ in image:
|
||||
image_ = image_.convert("RGB")
|
||||
image_ = image_.resize((width, height), resample=PIL_INTERPOLATION["lanczos"])
|
||||
image_ = np.array(image_)
|
||||
image_ = image_[None, :]
|
||||
images.append(image_)
|
||||
|
||||
image = images
|
||||
|
||||
image = np.concatenate(image, axis=0)
|
||||
image = np.array(image).astype(np.float32) / 255.0
|
||||
image = image.transpose(0, 3, 1, 2)
|
||||
|
|
|
|||
Loading…
Reference in New Issue