



🤗 Diffusers provides pretrained diffusion models across multiple modalities, such as vision and audio, and serves
as a modular toolbox for inference and training of diffusion models.
More precisely, 🤗 Diffusers offers:
- State-of-the-art diffusion pipelines that can be run in inference with just a couple of lines of code (see [src/diffusers/pipelines](https://github.com/huggingface/diffusers/tree/main/src/diffusers/pipelines)).
- Various noise schedulers that can be used interchangeably for the prefered speed vs. quality trade-off in inference (see [src/diffusers/schedulers](https://github.com/huggingface/diffusers/tree/main/src/diffusers/schedulers)).
- Multiple types of models, such as UNet, that can be used as building blocks in an end-to-end diffusion system (see [src/diffusers/models](https://github.com/huggingface/diffusers/tree/main/src/diffusers/models)).
- Training examples to show how to train the most popular diffusion models (see [examples](https://github.com/huggingface/diffusers/tree/main/examples)).
## Definitions
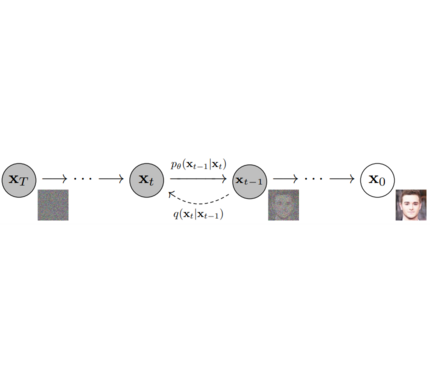
**Models**: Neural network that models $p_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t)$ (see image below) and is trained end-to-end to *denoise* a noisy input to an image.
*Examples*: UNet, Conditioned UNet, 3D UNet, Transformer UNet
**Schedulers**: Algorithm class for both **inference** and **training**.
The class provides functionality to compute previous image according to alpha, beta schedule as well as predict noise for training.
*Examples*: [DDPM](https://arxiv.org/abs/2006.11239), [DDIM](https://arxiv.org/abs/2010.02502), [PNDM](https://arxiv.org/abs/2202.09778), [DEIS](https://arxiv.org/abs/2204.13902)
**Diffusion Pipeline**: End-to-end pipeline that includes multiple diffusion models, possible text encoders, ...
*Examples*: GLIDE, Latent-Diffusion, Imagen, DALL-E 2
## Philosophy
- Readability and clarity is prefered over highly optimized code. A strong importance is put on providing readable, intuitive and elementary code design. *E.g.*, the provided [schedulers](https://github.com/huggingface/diffusers/tree/main/src/diffusers/schedulers) are separated from the provided [models](https://github.com/huggingface/diffusers/tree/main/src/diffusers/models) and provide well-commented code that can be read alongside the original paper.
- Diffusers is **modality independent** and focusses on providing pretrained models and tools to build systems that generate **continous outputs**, *e.g.* vision and audio.
- Diffusion models and schedulers are provided as consise, elementary building blocks whereas diffusion pipelines are a collection of end-to-end diffusion systems that can be used out-of-the-box, should stay as close as possible to their original implementation and can include components of other library, such as text-encoders. Examples for diffusion pipelines are [Glide](https://github.com/openai/glide-text2im) and [Latent Diffusion](https://github.com/CompVis/latent-diffusion).
## Quickstart
### Installation
```
pip install diffusers # should install diffusers 0.0.4
```
### 1. `diffusers` as a toolbox for schedulers and models
`diffusers` is more modularized than `transformers`. The idea is that researchers and engineers can use only parts of the library easily for the own use cases.
It could become a central place for all kinds of models, schedulers, training utils and processors that one can mix and match for one's own use case.
Both models and schedulers should be load- and saveable from the Hub.
For more examples see [schedulers](https://github.com/huggingface/diffusers/tree/main/src/diffusers/schedulers) and [models](https://github.com/huggingface/diffusers/tree/main/src/diffusers/models)
#### **Example for [DDPM](https://arxiv.org/abs/2006.11239):**
```python
import torch
from diffusers import UNetModel, DDPMScheduler
import PIL
import numpy as np
import tqdm
generator = torch.manual_seed(0)
torch_device = "cuda" if torch.cuda.is_available() else "cpu"
# 1. Load models
noise_scheduler = DDPMScheduler.from_config("fusing/ddpm-lsun-church", tensor_format="pt")
unet = UNetModel.from_pretrained("fusing/ddpm-lsun-church").to(torch_device)
# 2. Sample gaussian noise
image = torch.randn(
(1, unet.in_channels, unet.resolution, unet.resolution),
generator=generator,
)
image = image.to(torch_device)
# 3. Denoise
num_prediction_steps = len(noise_scheduler)
for t in tqdm.tqdm(reversed(range(num_prediction_steps)), total=num_prediction_steps):
# predict noise residual
with torch.no_grad():
residual = unet(image, t)
# predict previous mean of image x_t-1
pred_prev_image = noise_scheduler.step(residual, image, t)
# optionally sample variance
variance = 0
if t > 0:
noise = torch.randn(image.shape, generator=generator).to(image.device)
variance = noise_scheduler.get_variance(t).sqrt() * noise
# set current image to prev_image: x_t -> x_t-1
image = pred_prev_image + variance
# 5. process image to PIL
image_processed = image.cpu().permute(0, 2, 3, 1)
image_processed = (image_processed + 1.0) * 127.5
image_processed = image_processed.numpy().astype(np.uint8)
image_pil = PIL.Image.fromarray(image_processed[0])
# 6. save image
image_pil.save("test.png")
```
#### **Example for [DDIM](https://arxiv.org/abs/2010.02502):**
```python
import torch
from diffusers import UNetModel, DDIMScheduler
import PIL
import numpy as np
import tqdm
generator = torch.manual_seed(0)
torch_device = "cuda" if torch.cuda.is_available() else "cpu"
# 1. Load models
noise_scheduler = DDIMScheduler.from_config("fusing/ddpm-celeba-hq", tensor_format="pt")
unet = UNetModel.from_pretrained("fusing/ddpm-celeba-hq").to(torch_device)
# 2. Sample gaussian noise
image = torch.randn(
(1, unet.in_channels, unet.resolution, unet.resolution),
generator=generator,
)
image = image.to(torch_device)
# 3. Denoise
num_inference_steps = 50
eta = 0.0 # <- deterministic sampling
for t in tqdm.tqdm(reversed(range(num_inference_steps)), total=num_inference_steps):
# 1. predict noise residual
orig_t = noise_scheduler.get_orig_t(t, num_inference_steps)
with torch.inference_mode():
residual = unet(image, orig_t)
# 2. predict previous mean of image x_t-1
pred_prev_image = noise_scheduler.step(residual, image, t, num_inference_steps, eta)
# 3. optionally sample variance
variance = 0
if eta > 0:
noise = torch.randn(image.shape, generator=generator).to(image.device)
variance = noise_scheduler.get_variance(t).sqrt() * eta * noise
# 4. set current image to prev_image: x_t -> x_t-1
image = pred_prev_image + variance
# 5. process image to PIL
image_processed = image.cpu().permute(0, 2, 3, 1)
image_processed = (image_processed + 1.0) * 127.5
image_processed = image_processed.numpy().astype(np.uint8)
image_pil = PIL.Image.fromarray(image_processed[0])
# 6. save image
image_pil.save("test.png")
```
### 2. `diffusers` as a collection of popular Diffusion systems (GLIDE, Dalle, ...)
For more examples see [pipelines](https://github.com/huggingface/diffusers/tree/main/src/diffusers/pipelines).
#### **Example image generation with PNDM**
```python
from diffusers import PNDM, UNetModel, PNDMScheduler
import PIL.Image
import numpy as np
import torch
model_id = "fusing/ddim-celeba-hq"
model = UNetModel.from_pretrained(model_id)
scheduler = PNDMScheduler()
# load model and scheduler
pndm = PNDM(unet=model, noise_scheduler=scheduler)
# run pipeline in inference (sample random noise and denoise)
with torch.no_grad():
image = pndm()
# process image to PIL
image_processed = image.cpu().permute(0, 2, 3, 1)
image_processed = (image_processed + 1.0) / 2
image_processed = torch.clamp(image_processed, 0.0, 1.0)
image_processed = image_processed * 255
image_processed = image_processed.numpy().astype(np.uint8)
image_pil = PIL.Image.fromarray(image_processed[0])
# save image
image_pil.save("test.png")
```
#### **Text to Image generation with Latent Diffusion**
_Note: To use latent diffusion install transformers from [this branch](https://github.com/patil-suraj/transformers/tree/ldm-bert)._
```python
from diffusers import DiffusionPipeline
ldm = DiffusionPipeline.from_pretrained("fusing/latent-diffusion-text2im-large")
generator = torch.manual_seed(42)
prompt = "A painting of a squirrel eating a burger"
image = ldm([prompt], generator=generator, eta=0.3, guidance_scale=6.0, num_inference_steps=50)
image_processed = image.cpu().permute(0, 2, 3, 1)
image_processed = image_processed * 255.
image_processed = image_processed.numpy().astype(np.uint8)
image_pil = PIL.Image.fromarray(image_processed[0])
# save image
image_pil.save("test.png")
```
#### **Text to speech with GradTTS and BDDM**
```python
import torch
from diffusers import BDDM, GradTTS
torch_device = "cuda"
# load grad tts and bddm pipelines
grad_tts = GradTTS.from_pretrained("fusing/grad-tts-libri-tts")
bddm = BDDM.from_pretrained("fusing/diffwave-vocoder-ljspeech")
text = "Hello world, I missed you so much."
# generate mel spectograms using text
mel_spec = grad_tts(text, torch_device=torch_device)
# generate the speech by passing mel spectograms to BDDM pipeline
generator = torch.manual_seed(42)
audio = bddm(mel_spec, generator, torch_device=torch_device)
# save generated audio
from scipy.io.wavfile import write as wavwrite
sampling_rate = 22050
wavwrite("generated_audio.wav", sampling_rate, audio.squeeze().cpu().numpy())
```
## TODO
- Create common API for models [ ]
- Add tests for models [ ]
- Adapt schedulers for training [ ]
- Write google colab for training [ ]
- Write docs / Think about how to structure docs [ ]
- Add tests to circle ci [ ]
- Add [Diffusion LM models](https://arxiv.org/pdf/2205.14217.pdf) [ ]
- Add more vision models [ ]
- Add more speech models [ ]
- Add RL model [ ]